









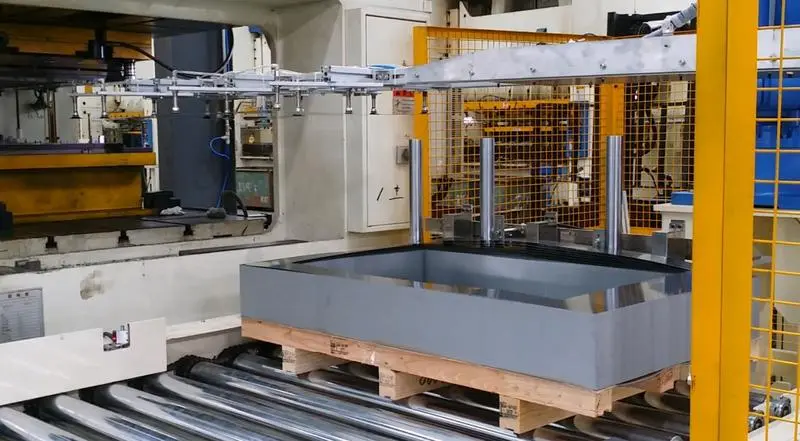
Process layout
This automation solution utilizes YASKAWA robots equipped with vacuum grippers to handle thin plates, automating the workpiece feeding process and significantly enhancing the safety of press operations.
Due to the nature of press processes—characterized by extremely short cycle times and high-risk environments—industrial accidents involving human operators are frequent.
By employing robot automation, particularly with vacuum grippers which are far more effective at handling thin plates than manual labor, this solution simultaneously improves production throughput and workplace safety.
Components
| Robot |
|
|---|
Workflow
| STEP 1. | Infeed: The workpiece moves to the designated pick-up position via the infeed conveyor. |
|---|---|
| STEP 2. | Picking: The robot secures the thin plate using its vacuum gripper. |
| STEP 3. | Loading: The robot loads the workpiece into the press machine. |
| STEP 4. | Pressing: The press operation is performed. |
Features
Simultaneous Improvement of Work Environment and Productivity
Continuous Operation: Ensures high productivity through non-stop, seamless cycles without idle time.
Safety First: Prevents industrial accidents by removing workers from high-risk press zones.
Optimized Design and Pre-Verification
Custom Tooling: Expert design and manufacturing of specialized end-of-arm tools (EOAT) tailored to specific work conditions and performance requirements.
Precision Vacuum Handling: Utilizes advanced vacuum grippers to accurately pick and unload thin products that are difficult to handle manually.
Single-Sheet Picking Logic: Implements specialized picking logic and mechanical structures to ensure only one sheet is picked at a time, preventing double-feeding errors.
Simulation-Based Validation: Conducts 3D simulations to perform interference checks and verify cycle time performance before on-site installation.
Results
| Key Benefits | Increased productivity through reduced cycle times.
Enhanced workplace safety by eliminating the risk of press-related accidents.
|
|---|---|
| Client Feedback | Through G-TEC’s solution, we successfully shortened our cycle times and achieved a significant boost in overall productivity.
|

Unauthorized copying or reproduction of any content on Marosol may violate the Unfair Competition Prevention Act and Copyright Act.
Recommended Solution

Powder Coating of Thin Plate Covers using Doosan M1013
This powder coating automation solution utilizes the Doosan M1013 collaborative robot to automate the powder coating of thin plate covers on a conveyor line. Due to the nature of powder coating, high levels of dust are generated, and the repetitive motions cause significant strain on the wrists, making it a task often avoided by workers. By implementing three robots to perform tasks previously handled by six manual workers, the working environment has been improved, and consistent quality has been secured.

Metal Machining Assistance for Two WIA Turning Centers using Hyundai Robots
This machine tending solution utilizes a Hyundai HH7 robot mounted on a linear track (7th axis) to assist metal machining across two WIA Turning Centers (HD2200Y). By leveraging a compact industrial robot and an additional 7th axis, the footprint required for automation is minimized. To ensure operator safety, an integrated robot safety fence was applied, and sensors were installed to decelerate or stop the robot upon detecting human proximity. Furthermore, the automation of both pre- and post-processing via conveyors enables 24-hour unmanned continuous production.

Beverage Box Palletizing using ABB IRB660
This palletizing automation solution utilizes the ABB IRB660, a dedicated palletizing robot, to automatically stack six heavy beverage boxes (approx. 30kg) at once onto a pallet. The system performs accurate stacking tasks in a short amount of time, taking less than 3 minutes to stack 9 layers of 12 boxes each (total of 108 boxes).
Process layout
This automation solution utilizes YASKAWA robots equipped with vacuum grippers to handle thin plates, automating the workpiece feeding process and significantly enhancing the safety of press operations.
Due to the nature of press processes—characterized by extremely short cycle times and high-risk environments—industrial accidents involving human operators are frequent.
By employing robot automation, particularly with vacuum grippers which are far more effective at handling thin plates than manual labor, this solution simultaneously improves production throughput and workplace safety.
Components
| Robot |
|
|---|
Workflow
| STEP 1. | Infeed: The workpiece moves to the designated pick-up position via the infeed conveyor. |
|---|---|
| STEP 2. | Picking: The robot secures the thin plate using its vacuum gripper. |
| STEP 3. | Loading: The robot loads the workpiece into the press machine. |
| STEP 4. | Pressing: The press operation is performed. |
Features
Simultaneous Improvement of Work Environment and Productivity
Continuous Operation: Ensures high productivity through non-stop, seamless cycles without idle time.
Safety First: Prevents industrial accidents by removing workers from high-risk press zones.
Optimized Design and Pre-Verification
Custom Tooling: Expert design and manufacturing of specialized end-of-arm tools (EOAT) tailored to specific work conditions and performance requirements.
Precision Vacuum Handling: Utilizes advanced vacuum grippers to accurately pick and unload thin products that are difficult to handle manually.
Single-Sheet Picking Logic: Implements specialized picking logic and mechanical structures to ensure only one sheet is picked at a time, preventing double-feeding errors.
Simulation-Based Validation: Conducts 3D simulations to perform interference checks and verify cycle time performance before on-site installation.
Results
| Key Benefits | Increased productivity through reduced cycle times.
Enhanced workplace safety by eliminating the risk of press-related accidents.
|
|---|---|
| Client Feedback | Through G-TEC’s solution, we successfully shortened our cycle times and achieved a significant boost in overall productivity.
|
Unauthorized copying or reproduction of any content on Marosol may violate the Unfair Competition Prevention Act and Copyright Act.
Recommended Solution
Powder Coating of Thin Plate Covers using Doosan M1013
This powder coating automation solution utilizes the Doosan M1013 collaborative robot to automate the powder coating of thin plate covers on a conveyor line. Due to the nature of powder coating, high levels of dust are generated, and the repetitive motions cause significant strain on the wrists, making it a task often avoided by workers. By implementing three robots to perform tasks previously handled by six manual workers, the working environment has been improved, and consistent quality has been secured.
Metal Machining Assistance for Two WIA Turning Centers using Hyundai Robots
This machine tending solution utilizes a Hyundai HH7 robot mounted on a linear track (7th axis) to assist metal machining across two WIA Turning Centers (HD2200Y). By leveraging a compact industrial robot and an additional 7th axis, the footprint required for automation is minimized. To ensure operator safety, an integrated robot safety fence was applied, and sensors were installed to decelerate or stop the robot upon detecting human proximity. Furthermore, the automation of both pre- and post-processing via conveyors enables 24-hour unmanned continuous production.
Beverage Box Palletizing using ABB IRB660
This palletizing automation solution utilizes the ABB IRB660, a dedicated palletizing robot, to automatically stack six heavy beverage boxes (approx. 30kg) at once onto a pallet. The system performs accurate stacking tasks in a short amount of time, taking less than 3 minutes to stack 9 layers of 12 boxes each (total of 108 boxes).