









Process layout
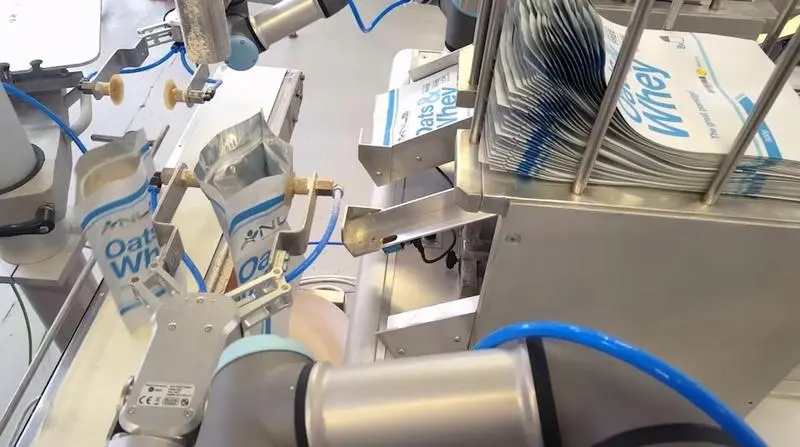
This application case features an automated grain filling process utilizing two Universal Robots UR3 units and OnRobot RG2 grippers. By positioning the compact UR3 robots on both sides of a pouch feeder, the system efficiently handles picking and opening pouches. The wide-stroke RG2 grippers allow for rapid and precise manipulation of flexible packaging, ensuring a streamlined flow from feeding to grain dispensing.
Components
| Robot |
|
|---|
Workflow
| STEP 1. | Feeding: Pouches are supplied through a dedicated feeder. |
|---|---|
| STEP 2. | Picking: The dual UR3 robots pick up the pouches using RG2 grippers. |
| STEP 3. | Filling: Grain is accurately dispensed into the opened pouches. |
| STEP 4. | Discharge: The filled pouches are moved onto a conveyor for the next process. |
Features
Maximize Space Utilization with Compact Cobots
Small Footprint: Utilizes 3kg-class compact collaborative robots (UR3) to minimize process layout changes, allowing for installation in confined or narrow spaces.
Increased Productivity with Multi-Purpose Grippers
Integrated Handling: Combines long-stroke scissor-type grippers (RG2) with vacuum grippers to simultaneously perform pouch picking and opening.
Minimized Downtime: Optimized gripper configurations reduce idle time during process transitions.
Results
| Key Benefits | Reduction in labor required for repetitive manual tasks.
Increased productivity through continuous production with minimized idle time.
|
|---|---|
| Client Feedback | Productivity has significantly increased thanks to the robot's ability to perform continuous, uninterrupted operations. |

Unauthorized copying or reproduction of any content on Marosol may violate the Unfair Competition Prevention Act and Copyright Act.
Recommended Solution

Palletizing Boxes using Comau PAL-180-3.1
This application is a solution that uses the Comau PAL-180-3.1 to palletize heavy beverage boxes. When humans repeatedly move large and heavy objects, it places a significant strain on the musculoskeletal system and cannot be sustained for long periods. On the other hand, large articulated robots are suitable for moving large and heavy objects as they can quickly move and stack items in desired positions.

Mobile Phone Box Packaging using Two Collaborative Robots (M0609, TM5) and OnRobot Grippers
This application case demonstrates a collaborative process between the Doosan Robotics M0609 and the Techman Robot TM5-900 to automate mobile phone box packaging. By integrating a variety of specialized grippers, the system can seamlessly handle the diverse components required for mobile phone packaging—from delicate manuals to the handsets themselves.

Clip Fastening Process using Neuromeka Indy7
This solution is an automated clip fastening process utilizing the Indy7. By automating the fastening process that causes wrist injuries and strain for workers, industrial accidents decreased and quality productivity improved.
Process layout
This application case features an automated grain filling process utilizing two Universal Robots UR3 units and OnRobot RG2 grippers. By positioning the compact UR3 robots on both sides of a pouch feeder, the system efficiently handles picking and opening pouches. The wide-stroke RG2 grippers allow for rapid and precise manipulation of flexible packaging, ensuring a streamlined flow from feeding to grain dispensing.
Components
| Robot |
|
|---|
Workflow
| STEP 1. | Feeding: Pouches are supplied through a dedicated feeder. |
|---|---|
| STEP 2. | Picking: The dual UR3 robots pick up the pouches using RG2 grippers. |
| STEP 3. | Filling: Grain is accurately dispensed into the opened pouches. |
| STEP 4. | Discharge: The filled pouches are moved onto a conveyor for the next process. |
Features
Maximize Space Utilization with Compact Cobots
Small Footprint: Utilizes 3kg-class compact collaborative robots (UR3) to minimize process layout changes, allowing for installation in confined or narrow spaces.
Increased Productivity with Multi-Purpose Grippers
Integrated Handling: Combines long-stroke scissor-type grippers (RG2) with vacuum grippers to simultaneously perform pouch picking and opening.
Minimized Downtime: Optimized gripper configurations reduce idle time during process transitions.
Results
| Key Benefits | Reduction in labor required for repetitive manual tasks.
Increased productivity through continuous production with minimized idle time.
|
|---|---|
| Client Feedback | Productivity has significantly increased thanks to the robot's ability to perform continuous, uninterrupted operations. |
Unauthorized copying or reproduction of any content on Marosol may violate the Unfair Competition Prevention Act and Copyright Act.
Recommended Solution
Palletizing Boxes using Comau PAL-180-3.1
This application is a solution that uses the Comau PAL-180-3.1 to palletize heavy beverage boxes. When humans repeatedly move large and heavy objects, it places a significant strain on the musculoskeletal system and cannot be sustained for long periods. On the other hand, large articulated robots are suitable for moving large and heavy objects as they can quickly move and stack items in desired positions.
Mobile Phone Box Packaging using Two Collaborative Robots (M0609, TM5) and OnRobot Grippers
This application case demonstrates a collaborative process between the Doosan Robotics M0609 and the Techman Robot TM5-900 to automate mobile phone box packaging. By integrating a variety of specialized grippers, the system can seamlessly handle the diverse components required for mobile phone packaging—from delicate manuals to the handsets themselves.
Clip Fastening Process using Neuromeka Indy7
This solution is an automated clip fastening process utilizing the Indy7. By automating the fastening process that causes wrist injuries and strain for workers, industrial accidents decreased and quality productivity improved.