









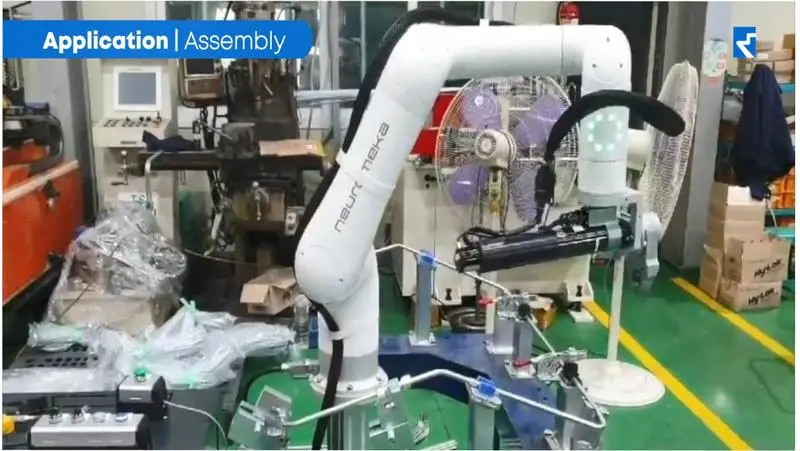
Process layout
This solution is an automated clip fastening process utilizing the Indy7.
By automating the fastening process that causes wrist injuries and strain for workers, industrial accidents decreased and quality productivity improved.
Components
| Robot | Robot Indy7: 6-axis collaborative robot, payload 7kg, maximum reach 1.3m, weight 28kg, repeatability: ± 0.1 mm |
|---|
Workflow
| STEP 1. | Move robot end-tool to the clip position aligned with the clip. |
|---|---|
| STEP 2. | Fasten the clip. |
| STEP 3. | Repeat the previous process multiple times |
Features
Excellent production efficiency and quality improvement
Automated clip fastening that caused strain on the worker's wrist
Expected consistent quality by fastening clips to a uniform degree
Continuous operation possible
Can be installed in narrow spaces by using a compact collaborative robot
Results
| Key Benefits | Prevention of worker injury
Improvement of workpiece quality |
|---|---|
| Client Feedback | Production CAPA has greatly increased as continuous production is possible by minimizing work idle and wait times.
|

Unauthorized copying or reproduction of any content on Marosol may violate the Unfair Competition Prevention Act and Copyright Act.
Recommended Solution

Automation Solution using an All Picker Gripper, Featuring Automated Part Assembly and Processing Lines
Process Overview This deployment is an automation solution for part assembly and processing lines using an All Picker Gripper. As the name suggests, the All Picker Gripper is designed to pick a wide range of objects, and it can perform stable picking even when the workpiece has holes or an irregular shape.

Automotive Component Assembly Automation using Epson C4 + FT Sensor
Process Overview This assembly automation solution uses an Epson C4 robot and an FT (Force-Torque) sensor to automate the task of inserting and fastening automotive parts with a tight press-fit tolerance. Even when the fit is extremely tight, the system can detect insertion force, locate the correct position, and perform smooth insertion without part damage or jamming. This project was implemented to automate the insertion of fixing pins used in automotive components.

Machining Support for a WIA Turning Center using Two DENSO Robots ⚙️🏭
Process Overview This automation solution uses two DENSO robots—VM60B1 (6-axis vertical articulated robot) and HS055 (SCARA robot)—to automate raw material loading, turning-center machining of plastic parts, and a downstream press-fit (crimping) operation. By integrating material loading, machining support, and press-fit handling into a single automated workflow, the system minimizes control points while improving overall productivity.
Process layout
This solution is an automated clip fastening process utilizing the Indy7.
By automating the fastening process that causes wrist injuries and strain for workers, industrial accidents decreased and quality productivity improved.
Components
| Robot | Robot Indy7: 6-axis collaborative robot, payload 7kg, maximum reach 1.3m, weight 28kg, repeatability: ± 0.1 mm |
|---|
Workflow
| STEP 1. | Move robot end-tool to the clip position aligned with the clip. |
|---|---|
| STEP 2. | Fasten the clip. |
| STEP 3. | Repeat the previous process multiple times |
Features
Excellent production efficiency and quality improvement
Automated clip fastening that caused strain on the worker's wrist
Expected consistent quality by fastening clips to a uniform degree
Continuous operation possible
Can be installed in narrow spaces by using a compact collaborative robot
Results
| Key Benefits | Prevention of worker injury
Improvement of workpiece quality |
|---|---|
| Client Feedback | Production CAPA has greatly increased as continuous production is possible by minimizing work idle and wait times.
|
Unauthorized copying or reproduction of any content on Marosol may violate the Unfair Competition Prevention Act and Copyright Act.
Recommended Solution
Automation Solution using an All Picker Gripper, Featuring Automated Part Assembly and Processing Lines
Process Overview This deployment is an automation solution for part assembly and processing lines using an All Picker Gripper. As the name suggests, the All Picker Gripper is designed to pick a wide range of objects, and it can perform stable picking even when the workpiece has holes or an irregular shape.
Automotive Component Assembly Automation using Epson C4 + FT Sensor
Process Overview This assembly automation solution uses an Epson C4 robot and an FT (Force-Torque) sensor to automate the task of inserting and fastening automotive parts with a tight press-fit tolerance. Even when the fit is extremely tight, the system can detect insertion force, locate the correct position, and perform smooth insertion without part damage or jamming. This project was implemented to automate the insertion of fixing pins used in automotive components.
Machining Support for a WIA Turning Center using Two DENSO Robots ⚙️🏭
Process Overview This automation solution uses two DENSO robots—VM60B1 (6-axis vertical articulated robot) and HS055 (SCARA robot)—to automate raw material loading, turning-center machining of plastic parts, and a downstream press-fit (crimping) operation. By integrating material loading, machining support, and press-fit handling into a single automated workflow, the system minimizes control points while improving overall productivity.