









Process layout
Process Overview
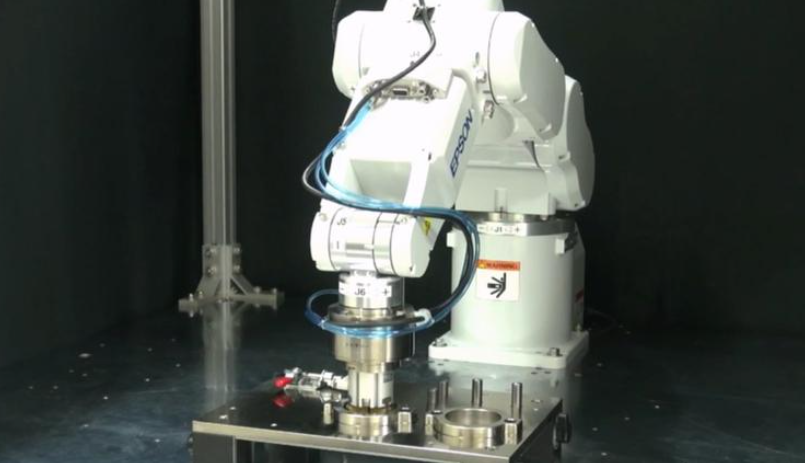
This assembly automation solution uses an Epson C4 robot and an FT (Force-Torque) sensor to automate the task of inserting and fastening automotive parts with a tight press-fit tolerance.
Even when the fit is extremely tight, the system can detect insertion force, locate the correct position, and perform smooth insertion without part damage or jamming.
This project was implemented to automate the insertion of fixing pins used in automotive components.
Components
| Robot |
|
|---|---|
| Peripherals |
|
Workflow
| STEP 1. | Pick the lower part and place it at the assembly position |
|---|---|
| STEP 2. | Clamp and secure the workpiece |
| STEP 3. | Pick and insert the connecting pin |
| STEP 4. | Pick the upper part and align to the pin position while rotating for insertion |
Features
Enables high-precision insertion operations
Ensures precise insertion even with micro-level tolerances by applying an FT sensor capable of detecting 0.1 N / 0.003 Nm and high repeatability
Detects and compensates for pin position error and tilt direction through force-direction sensing
Prevents part damage during insertion/assembly through precise force sensing
Enables controlled insertion by adjusting force even with part shape variation
Enables compact installation
Minimizes installation and operation space through compact robot form factor
Minimizes takt time through high-speed operation
Enables high-speed operation with a maximum joint speed of 720 deg/s
Provides assurance through quality warranty coverage
Provides 1-year warranty service support
Results
| Key Benefits | Reduced labor input for automotive pin insertion operations |
|---|---|
| Client Feedback | For pin insertion, the tolerance was extremely tight at a 10-micron level, making even manual assembly difficult. Automation had been delayed, but through Dream’s solution, automation became feasible. |

Unauthorized copying or reproduction of any content on Marosol may violate the Unfair Competition Prevention Act and Copyright Act.
Recommended Solution

Engine Parts Deburring Automation using FANUC Robot
Process Overview This deburring automation solution uses the FANUC M-10iA/12 robot to automate manual deburring operations for engine parts. By applying Youngchang Robotech's solution with a deburring tool that can maintain appropriate force according to input conditions, the system enables precise and consistent deburring quality. Configured as a single automation cell, the solution is easy to install and operate, and it also supports deburring at multiple angles even for complex-shaped parts.

Automotive Harness Component Assembly with a Vibratory Feeder and EPSON C4L
Process Overview This solution assembles automotive harness components using a vibratory feeder combined with an Epson C4L robot and a vision system. Bulk-fed parts are separated by the vibratory feeder, and the separated parts are located through vision for picking. By quickly separating, detecting, and picking parts in line with production speed, productivity can be improved.

Automotive Rubber Packing Assembly Automation with a Cartesian Robot and EPSON C4
Process Overview This solution assembles rubber packings onto automotive electronic components using an Epson C4 robot. By combining a cartesian robot and an industrial robot to correct the picking orientation, rubber packing assembly can be performed quickly and consistently.
Process layout
Process Overview
This assembly automation solution uses an Epson C4 robot and an FT (Force-Torque) sensor to automate the task of inserting and fastening automotive parts with a tight press-fit tolerance.
Even when the fit is extremely tight, the system can detect insertion force, locate the correct position, and perform smooth insertion without part damage or jamming.
This project was implemented to automate the insertion of fixing pins used in automotive components.
Components
| Robot |
|
|---|---|
| Peripherals |
|
Workflow
| STEP 1. | Pick the lower part and place it at the assembly position |
|---|---|
| STEP 2. | Clamp and secure the workpiece |
| STEP 3. | Pick and insert the connecting pin |
| STEP 4. | Pick the upper part and align to the pin position while rotating for insertion |
Features
Enables high-precision insertion operations
Ensures precise insertion even with micro-level tolerances by applying an FT sensor capable of detecting 0.1 N / 0.003 Nm and high repeatability
Detects and compensates for pin position error and tilt direction through force-direction sensing
Prevents part damage during insertion/assembly through precise force sensing
Enables controlled insertion by adjusting force even with part shape variation
Enables compact installation
Minimizes installation and operation space through compact robot form factor
Minimizes takt time through high-speed operation
Enables high-speed operation with a maximum joint speed of 720 deg/s
Provides assurance through quality warranty coverage
Provides 1-year warranty service support
Results
| Key Benefits | Reduced labor input for automotive pin insertion operations |
|---|---|
| Client Feedback | For pin insertion, the tolerance was extremely tight at a 10-micron level, making even manual assembly difficult. Automation had been delayed, but through Dream’s solution, automation became feasible. |
Unauthorized copying or reproduction of any content on Marosol may violate the Unfair Competition Prevention Act and Copyright Act.
Recommended Solution
Engine Parts Deburring Automation using FANUC Robot
Process Overview This deburring automation solution uses the FANUC M-10iA/12 robot to automate manual deburring operations for engine parts. By applying Youngchang Robotech's solution with a deburring tool that can maintain appropriate force according to input conditions, the system enables precise and consistent deburring quality. Configured as a single automation cell, the solution is easy to install and operate, and it also supports deburring at multiple angles even for complex-shaped parts.
Automotive Harness Component Assembly with a Vibratory Feeder and EPSON C4L
Process Overview This solution assembles automotive harness components using a vibratory feeder combined with an Epson C4L robot and a vision system. Bulk-fed parts are separated by the vibratory feeder, and the separated parts are located through vision for picking. By quickly separating, detecting, and picking parts in line with production speed, productivity can be improved.
Automotive Rubber Packing Assembly Automation with a Cartesian Robot and EPSON C4
Process Overview This solution assembles rubber packings onto automotive electronic components using an Epson C4 robot. By combining a cartesian robot and an industrial robot to correct the picking orientation, rubber packing assembly can be performed quickly and consistently.