









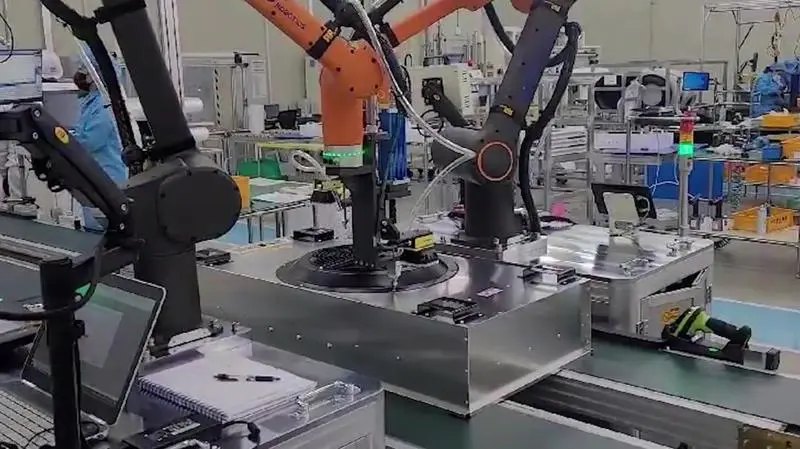
Process layout
This application is a solution that automates bolt fastening using two Hanwha Momentum HCR-12A collaborative robots.
Bolt fastening often leads to task failure even if the position is slightly off, and products can be damaged or misassembled if not assembled with appropriate force. The high positioning precision of the HCR-12A minimizes errors and allows for the task to be performed.
Components
| Robot | Robot HCR-12A: 6-axis articulated robot, payload 12kg, maximum reach 1,300mm, weight 52kg, repeatability: ± 0.07 mm; Tool: Automatic feed bolt fastener |
|---|
Workflow
| STEP 1. | STEP 1. The jig with the workpiece moves to the assembly position via conveyor |
|---|---|
| STEP 2. | Confirm the work position using inspection lighting |
| STEP 3. | Perform bolt fastening task |
| STEP 4. | Repeat the previous process |
Features
Fastening performed after position confirmation with lighting equipment
: High accuracy by using the same lighting equipment as vision inspection
Fastening possible even if the jig is misaligned
Excellent precision and fast speed
: High repeatability of 0.07mm suitable for bolt fastening
Fast speed of up to 1m/s based on the end-tool
Easy-to-use solution
: Intuitive UI allows anyone to operate easily
Results
| Key Benefits | Increased bolt assembly accuracy
Reduced labor costs for bolt assembly tasks |
|---|---|
| Client Feedback | More accurate and faster bolt fastening is possible by automatically identifying the work position through lighting equipment.
|

Unauthorized copying or reproduction of any content on Marosol may violate the Unfair Competition Prevention Act and Copyright Act.
Recommended Solution

Clip Fastening Process using Neuromeka Indy7
This solution is an automated clip fastening process utilizing the Indy7. By automating the fastening process that causes wrist injuries and strain for workers, industrial accidents decreased and quality productivity improved.

Why Did Luminous Robotics Entrust Solar Panel Installation to a Mobile Manipulator (Mobile robot arm) for Automation?
Gemini의 응답 Project Overview This solution, applied to a large-scale solar power plant construction site in Australia, is an automation system for installation based on a Mobile Manipulator, centered around 'LUMI', an autonomous mobile robot developed by Luminous Robotics. The site presented challenging conditions for human workers, including high temperatures, strong winds, and rough terrain. Consequently, there has been a rising demand for Construction Automation due to labor shortages and increasing labor costs. LUMI is a mobile robot arm designed to install heavy solar panels quickly and accurately, featuring an integrated structure of autonomous driving capabilities, a robot arm, and high-precision sensors. Notably, it is designed to integrate seamlessly with existing labor-centered installation methods, enabling a transition to site automation without requiring separate infrastructure changes. Project Background & Objectives Background While Australia has an environment favorable for creating large-scale solar power complexes due to abundant solar radiation, the nature of remote areas—where securing construction labor is difficult—has led to continuous issues with slow installation speeds and rising costs. In particular, with panels weighing over 36kg, repetitive installation tasks under hot and humid conditions increased the risk of worker injury and led to decreased productivity. Objectives Improve solar panel installation speed and reduce labor costs Ensure consistency in installation quality Secure operational safety in extreme environments Establish a foundation for large-scale automation to expand Renewable Energy infrastructure

ARC Welding using the Rainbow Robotics RB-5
Process Overview This welding automation solution uses the Rainbow Robotics RB-5 and a NOUBELON DIGITAL MIG/MAG welder to weld cylindrical workpieces onto a plate, featuring fast teaching and high space efficiency. In manual welding, quality can vary significantly depending on operator skill, and the harsh working environment makes it difficult to secure experienced welders. With this cell, even non-expert operators can simply load and unload parts, while the robot performs the critical welding process—enabling consistent weld quality and stable production output.
Process layout
This application is a solution that automates bolt fastening using two Hanwha Momentum HCR-12A collaborative robots.
Bolt fastening often leads to task failure even if the position is slightly off, and products can be damaged or misassembled if not assembled with appropriate force. The high positioning precision of the HCR-12A minimizes errors and allows for the task to be performed.
Components
| Robot | Robot HCR-12A: 6-axis articulated robot, payload 12kg, maximum reach 1,300mm, weight 52kg, repeatability: ± 0.07 mm; Tool: Automatic feed bolt fastener |
|---|
Workflow
| STEP 1. | STEP 1. The jig with the workpiece moves to the assembly position via conveyor |
|---|---|
| STEP 2. | Confirm the work position using inspection lighting |
| STEP 3. | Perform bolt fastening task |
| STEP 4. | Repeat the previous process |
Features
Fastening performed after position confirmation with lighting equipment
: High accuracy by using the same lighting equipment as vision inspection
Fastening possible even if the jig is misaligned
Excellent precision and fast speed
: High repeatability of 0.07mm suitable for bolt fastening
Fast speed of up to 1m/s based on the end-tool
Easy-to-use solution
: Intuitive UI allows anyone to operate easily
Results
| Key Benefits | Increased bolt assembly accuracy
Reduced labor costs for bolt assembly tasks |
|---|---|
| Client Feedback | More accurate and faster bolt fastening is possible by automatically identifying the work position through lighting equipment.
|
Unauthorized copying or reproduction of any content on Marosol may violate the Unfair Competition Prevention Act and Copyright Act.
Recommended Solution
Clip Fastening Process using Neuromeka Indy7
This solution is an automated clip fastening process utilizing the Indy7. By automating the fastening process that causes wrist injuries and strain for workers, industrial accidents decreased and quality productivity improved.
Why Did Luminous Robotics Entrust Solar Panel Installation to a Mobile Manipulator (Mobile robot arm) for Automation?
Gemini의 응답 Project Overview This solution, applied to a large-scale solar power plant construction site in Australia, is an automation system for installation based on a Mobile Manipulator, centered around 'LUMI', an autonomous mobile robot developed by Luminous Robotics. The site presented challenging conditions for human workers, including high temperatures, strong winds, and rough terrain. Consequently, there has been a rising demand for Construction Automation due to labor shortages and increasing labor costs. LUMI is a mobile robot arm designed to install heavy solar panels quickly and accurately, featuring an integrated structure of autonomous driving capabilities, a robot arm, and high-precision sensors. Notably, it is designed to integrate seamlessly with existing labor-centered installation methods, enabling a transition to site automation without requiring separate infrastructure changes. Project Background & Objectives Background While Australia has an environment favorable for creating large-scale solar power complexes due to abundant solar radiation, the nature of remote areas—where securing construction labor is difficult—has led to continuous issues with slow installation speeds and rising costs. In particular, with panels weighing over 36kg, repetitive installation tasks under hot and humid conditions increased the risk of worker injury and led to decreased productivity. Objectives Improve solar panel installation speed and reduce labor costs Ensure consistency in installation quality Secure operational safety in extreme environments Establish a foundation for large-scale automation to expand Renewable Energy infrastructure
ARC Welding using the Rainbow Robotics RB-5
Process Overview This welding automation solution uses the Rainbow Robotics RB-5 and a NOUBELON DIGITAL MIG/MAG welder to weld cylindrical workpieces onto a plate, featuring fast teaching and high space efficiency. In manual welding, quality can vary significantly depending on operator skill, and the harsh working environment makes it difficult to secure experienced welders. With this cell, even non-expert operators can simply load and unload parts, while the robot performs the critical welding process—enabling consistent weld quality and stable production output.