









Process layout
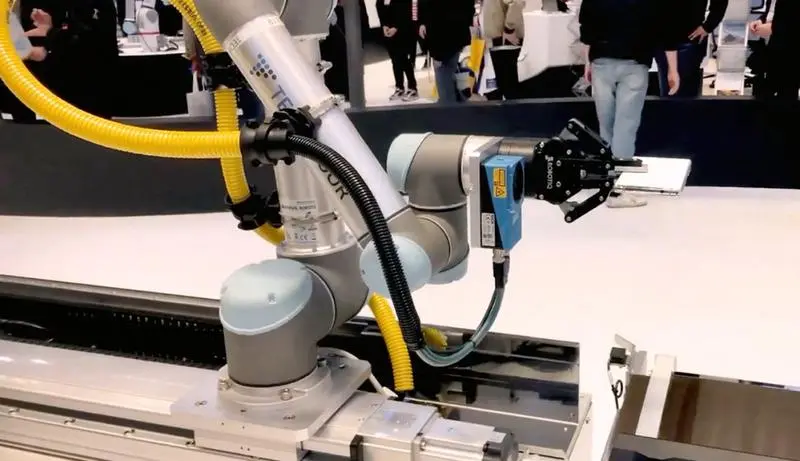
This automated sorting and storage solution utilizes a Universal Robots UR5 collaborative robot mounted on a Linear Track (7th axis) to perform high-precision handling of smartphones.
By integrating 2D Vision, the system identifies the type and position of items arriving via conveyor. The 6-axis articulated robot then uses an electric gripper to sort and stack these items into specific locations. Conversely, when a retrieval command is received, the robot can pick the required items from the storage rack and move them to the discharge position. The linear track allows the robot to cover a significantly wider workspace, making it ideal for comprehensive inbound/outbound inventory management.
Components
| Robot |
|
|---|
Workflow
| STEP 1. | Inbound: Inbound items are fed into the designated position on the conveyor. |
|---|---|
| STEP 2. | Recognition: The 2D vision system identifies the specific product item and its orientation. |
| STEP 3. | Sorting: The robot picks up the item and traverses the linear track to unload it at the designated storage location. |
| STEP 4. | Completion: Once all items are sorted and unloaded, the system sends a "Task Complete" signal to the management system. |
Features
High-ROI Automation Investment
Cost-Efficient Solution: Achieve significant labor savings and process consistency with a relatively low initial capital investment.
Rapid Deployment: The intuitive programming of the UR5 allows for faster setup compared to traditional industrial robots, accelerating the timeline to profitability.
Compact and Scalable Layout
Space Optimization: The Universal Robots UR5 features a small footprint and high maneuverability, minimizing the required installation space in cramped factory environments.
Expanded Work Envelope: By integrating a Linear Track (7th Axis), a single robot can service multiple workstations or long rows of storage racks, providing a much wider operational range than a fixed-base robot.
Maximum Operational Flexibility
Versatile Handling: Equipped with a long-stroke electric gripper (up to 85mm), the system can handle a wide variety of product sizes and shapes without changing tools.
Sensitive Force Control: Integrated Force Sensing prevents damage to delicate smartphones or electronic components, ensuring safe and secure handling.
Logistics Expansion: Leveraging deep expertise in mobile robotics, this system can be easily integrated with conveyor-type AMRs to fully automate both inbound and outbound logistics flows.
Results
| Key Benefits | Quantitative Indicator: Reduction in Manual Labor Deployment |
|---|

Unauthorized copying or reproduction of any content on Marosol may violate the Unfair Competition Prevention Act and Copyright Act.
Recommended Solution

PCB Flex Cable Insertion using Epson N2 and FT Sensors
This assembly automation solution utilizes the Epson N2 robot and FT (Force-Torque) sensors to automate the highly difficult process of inserting Flex Cables into PCB connectors. It is the optimal solution for performing high-precision assembly tasks while minimizing cycle times within confined workspaces. This project was initiated to automate the Flex Cable insertion process, which previously relied entirely on manual labor.

Box Handling Solution using Hyundai HH020 and HRVision
This sorting automation solution utilizes the Hyundai HH020 robot and the HRVision 3D vision solution to automate the manual task of recognizing text on the tops of boxes and transferring them to a conveyor in a specific sequence. By leveraging the high-speed recognition capabilities of HRVision, the system can capture and process product images even while the objects are in motion, ensuring seamless and continuous operation.

Aluminum Storage Tank Welding using Panasonic Welding System
This welding automation solution utilizes the Panasonic Automatic Welding System (Active-TAWERS) to enable multi-angle welding of aluminum storage tanks. By incorporating a positioner, the system can flawlessly perform tasks on large structures like silos or in locations that are difficult for human workers to reach. Implementing automation with the Panasonic system allows for the simultaneous achievement of high welding speeds and superior quality. Since the integrated welding system, robot, and positioner are provided as a single package, rapid installation and tuning are possible.