









Process layout
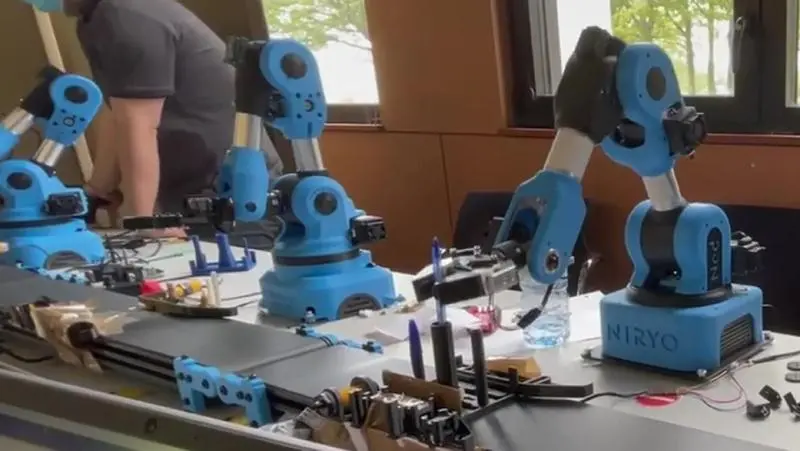
This educational solution utilizes Niryo Ned, a professional 6-axis collaborative robot from France, to perform ballpoint pen assembly programming. It is designed to enhance the understanding of robotic applications through a complete process that includes assembly, functional testing, and sorting.
Components
| Robot |
|
|---|
Workflow
| STEP 1. | Loading the ballpoint pen mounting jig. |
|---|---|
| STEP 2. | Assembling the pen ink refill. |
| STEP 3. | Securing the ink refill in place. |
| STEP 4. | Writing test to verify functionality. |
| STEP 5. | Assembling the pen cap. |
| STEP 6. | Sorting the finished pens based on color. |
Features
The Ideal Solution for Robotics Education
Open-Source Research Platform: Supports a wide range of programming environments, including ROS, Python, and C++, making it perfect for advanced research and development.
Intuitive Teaching Modes: Includes a "Learning Mode" where the robot can be taught motions by hand, as well as a user-friendly Blockly-based visual programming interface for beginners.
Versatile Ecosystem: Capable of handling diverse tasks by swapping between five types of specialized accessories, including conveyors and vision sets.
Industrial Precision: Guarantees an accuracy and repeatability of 0.5mm, ensuring reliable performance for delicate assembly tasks.
Results
| Client Feedback | The ability to run various educational programs in a hands-on format through its open-source platform has made the learning process exceptionally effective for our students. |
|---|
Unauthorized copying or reproduction of any content on Marosol may violate the Unfair Competition Prevention Act and Copyright Act.
Recommended Solution

AMR Logistics Robots Introduced to Manufacturing Factory ✨ Logistics Automation that Quickly Resolves Even 1 Ton of Waste Derbris (2 KUKA KMP 1500P Logistics Robots)
Automated the transport of waste materials weighing up to 1 ton, preventing material drops

Quadrupedal Robot Dog, Now Playing Badminton? A Leading Case of Physical Intelligence (PI) Machine Learning
Project Overview This implementation case demonstrates advanced Physical Intelligence (PI) based sports robot technology realized through the quadruped robot ANYmal-D developed at ETH Zurich, Switzerland. ANYmal-D is a cognitive robot capable of engaging in actual badminton rallies with humans through reinforcement learning. It recognizes the trajectory of the shuttlecock using only on-board sensors without external sensors and performs agile plays by moving strategically using its entire body. This project is drawing attention as a practical demonstration of situational responsive automation technology, where robots judge and react independently in dynamic environments, going beyond simple automation. Project Background & Objectives Background Conventional autonomous robots typically had limitations in performing repetitive tasks or following fixed trajectories in static environments. However, in unpredictable situations such as sports, advanced automation technology capable of real-time perception, judgment, and motion control is required. The research team at ETH Zurich pursued the ANYmal-D project with the goal of developing a robot system equipped with human-level athletic intelligence. Objectives Implementing autonomous responsive motion control in unstructured environments Developing an integrated perception-motion system using on-board sensors Technical demonstration of sports-type robots capable of collaborating with humans Testing reinforcement learning algorithms based on Physical Intelligence (PI)

Cart Towing and Elevator Navigation using OMRON LD-250
This solution implements cart towing and cross-floor transport using OMRON's LD-250. The OMRON LD-250 is an Autonomous Mobile Robot (AMR) that maps its environment and navigates along optimal paths, adapting to real-time changes on-site. While the LD-250 has a direct payload of 250kg, it can move even heavier loads when configured for towing. Its ability to interface with elevators allows for a much broader scope of automated cart transport across multiple floors of a building.
Process layout
This educational solution utilizes Niryo Ned, a professional 6-axis collaborative robot from France, to perform ballpoint pen assembly programming. It is designed to enhance the understanding of robotic applications through a complete process that includes assembly, functional testing, and sorting.
Components
| Robot |
|
|---|
Workflow
| STEP 1. | Loading the ballpoint pen mounting jig. |
|---|---|
| STEP 2. | Assembling the pen ink refill. |
| STEP 3. | Securing the ink refill in place. |
| STEP 4. | Writing test to verify functionality. |
| STEP 5. | Assembling the pen cap. |
| STEP 6. | Sorting the finished pens based on color. |
Features
The Ideal Solution for Robotics Education
Open-Source Research Platform: Supports a wide range of programming environments, including ROS, Python, and C++, making it perfect for advanced research and development.
Intuitive Teaching Modes: Includes a "Learning Mode" where the robot can be taught motions by hand, as well as a user-friendly Blockly-based visual programming interface for beginners.
Versatile Ecosystem: Capable of handling diverse tasks by swapping between five types of specialized accessories, including conveyors and vision sets.
Industrial Precision: Guarantees an accuracy and repeatability of 0.5mm, ensuring reliable performance for delicate assembly tasks.
Results
| Client Feedback | The ability to run various educational programs in a hands-on format through its open-source platform has made the learning process exceptionally effective for our students. |
|---|
Unauthorized copying or reproduction of any content on Marosol may violate the Unfair Competition Prevention Act and Copyright Act.
Recommended Solution
AMR Logistics Robots Introduced to Manufacturing Factory ✨ Logistics Automation that Quickly Resolves Even 1 Ton of Waste Derbris (2 KUKA KMP 1500P Logistics Robots)
Automated the transport of waste materials weighing up to 1 ton, preventing material drops
Quadrupedal Robot Dog, Now Playing Badminton? A Leading Case of Physical Intelligence (PI) Machine Learning
Project Overview This implementation case demonstrates advanced Physical Intelligence (PI) based sports robot technology realized through the quadruped robot ANYmal-D developed at ETH Zurich, Switzerland. ANYmal-D is a cognitive robot capable of engaging in actual badminton rallies with humans through reinforcement learning. It recognizes the trajectory of the shuttlecock using only on-board sensors without external sensors and performs agile plays by moving strategically using its entire body. This project is drawing attention as a practical demonstration of situational responsive automation technology, where robots judge and react independently in dynamic environments, going beyond simple automation. Project Background & Objectives Background Conventional autonomous robots typically had limitations in performing repetitive tasks or following fixed trajectories in static environments. However, in unpredictable situations such as sports, advanced automation technology capable of real-time perception, judgment, and motion control is required. The research team at ETH Zurich pursued the ANYmal-D project with the goal of developing a robot system equipped with human-level athletic intelligence. Objectives Implementing autonomous responsive motion control in unstructured environments Developing an integrated perception-motion system using on-board sensors Technical demonstration of sports-type robots capable of collaborating with humans Testing reinforcement learning algorithms based on Physical Intelligence (PI)
Cart Towing and Elevator Navigation using OMRON LD-250
This solution implements cart towing and cross-floor transport using OMRON's LD-250. The OMRON LD-250 is an Autonomous Mobile Robot (AMR) that maps its environment and navigates along optimal paths, adapting to real-time changes on-site. While the LD-250 has a direct payload of 250kg, it can move even heavier loads when configured for towing. Its ability to interface with elevators allows for a much broader scope of automated cart transport across multiple floors of a building.