









Process layout
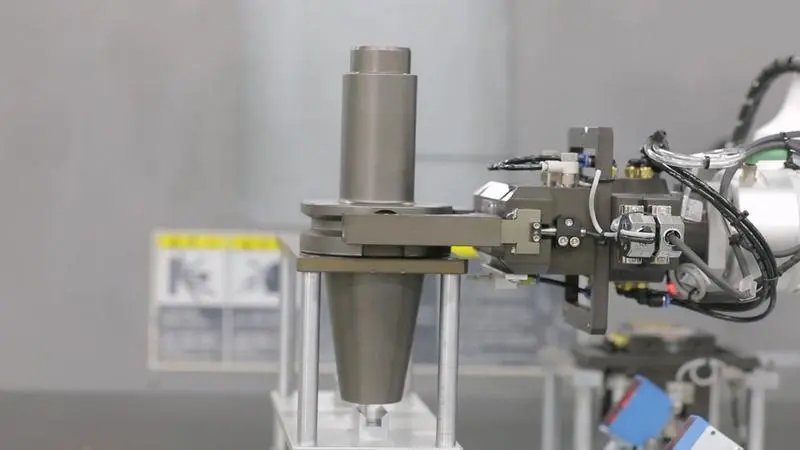
This automation solution utilizes the Doosan M1013 collaborative robot and a WIA Turning Center to automate the process of loading raw materials and machining chuck holders.
In the previous manual process, operators had to remain stationed in front of the machine to feed parts one by one. With this solution, the robot takes over the loading and unloading tasks, allowing the human operator to manage and operate multiple machines simultaneously, significantly increasing overall labor efficiency.
Components
| Robot |
|
|---|
Workflow
| STEP 1. | Picking: The robot picks raw material from the supply pallet and unloads it onto a re-gripping jig. |
|---|---|
| STEP 2. | Gripper Adjustment: The robot changes its gripping position to ensure optimal alignment for machine insertion. |
| STEP 3. | Loading: The robot picks the material from the jig and seats it precisely into the WIA Turning Center chuck. |
| STEP 4. | Machining: The Turning Center executes the machining program on the chuck holder. |
| STEP 5. | Unloading: Once finished, the robot picks the processed part and unloads it back onto the re-gripping jig. |
| STEP 6. | Stacking: After re-gripping, the robot places the finished part back into its original position on the pallet. |
Features
Maximizing Flexibility through Human-Robot Collaboration
Optimized Division of Labor: The robot continuously performs strenuous or repetitive loading tasks, while the human operator manages the overall workflow between pre- and post-processing stages, significantly increasing system efficiency.
Easy Work Teaching
Direct Teaching: Operators can teach new points simply by moving the robot arm by hand.
Compliance Control via Torque Sensors: Utilizing the high-sensitivity torque sensors, the robot can perform "soft" contact tasks, ensuring workpieces are perfectly seated flush against the chuck.
Rapid Changeovers: Even when part models change, additional teaching can be completed within 10 minutes, ensuring minimal production downtime.
Enhanced Operational Safety
Omnidirectional Sensitivity: High-resolution torque sensors (0.2Nm) are mounted on all 6 axes, allowing the robot to detect and stop immediately upon the slightest collision from any direction.
Shock-Minimizing Logic: Applies compliance control logic during picking and unloading to react softly to external forces, minimizing potential impact on both the robot and the workpiece.
Compact Installation
Space Efficiency: The compact design of the collaborative robot minimizes the physical footprint required for installation, allowing it to fit into existing factory layouts without major modifications.
Results
| Key Benefits | Improved operational efficiency by allowing existing workers to take on additional high-value tasks.
|
|---|---|
| Client Feedback | For products with long machining times, having a worker wait constantly was highly inefficient. Now, the robot handles the machining cycles, and the operator only needs to periodically exchange pallets. This has drastically boosted our overall labor productivity. |

Unauthorized copying or reproduction of any content on Marosol may violate the Unfair Competition Prevention Act and Copyright Act.
Recommended Solution

Inspection & Palletizing of Insert Molded Parts through YASKAWA GP8
This automation solution streamlines the post-molding process for insert molded parts through the YASKAWA Motoman-GP8. It automates the entire sequence—from appearance inspection to the selection and palletizing of products—leveraging a high-precision vision system. The system performs simultaneous inspection of two products, executing individual discharge or palletizing based on the specific results for each. By replacing manual visual checks with 100% automated vision inspection, the solution has significantly improved detection rates and overall product quality.

Steel Plate Bending through Hyundai Robotics HS220
This automation solution utilizes the Hyundai Robotics HS220 to automate the high-risk task of bending heavy steel plates into complex shapes. Due to the weight and large dimensions of these products, manual operation is physically demanding and significantly hinders production efficiency. This project was initiated to boost productivity through heavy-load automation and to ensure workplace safety by removing workers from hazardous zones. Because the robot maintains its grip on the steel plate during the entire bending process, cycle times are shortened, ensuring high output and consistent quality.

Implant 3D Inspection and Bin Picking using Denso COBOTTA
This quality inspection automation solution utilizes the Denso COBOTTA compact collaborative robot and QRS 3D vision to automate the bin picking of dental implants. This system is designed to handle the loading and inspection of implants during the machining process. Even for small and complex workpieces like implants, the QRS 3D vision system enables highly effective picking and sorting operations.
Process layout
This automation solution utilizes the Doosan M1013 collaborative robot and a WIA Turning Center to automate the process of loading raw materials and machining chuck holders.
In the previous manual process, operators had to remain stationed in front of the machine to feed parts one by one. With this solution, the robot takes over the loading and unloading tasks, allowing the human operator to manage and operate multiple machines simultaneously, significantly increasing overall labor efficiency.
Components
| Robot |
|
|---|
Workflow
| STEP 1. | Picking: The robot picks raw material from the supply pallet and unloads it onto a re-gripping jig. |
|---|---|
| STEP 2. | Gripper Adjustment: The robot changes its gripping position to ensure optimal alignment for machine insertion. |
| STEP 3. | Loading: The robot picks the material from the jig and seats it precisely into the WIA Turning Center chuck. |
| STEP 4. | Machining: The Turning Center executes the machining program on the chuck holder. |
| STEP 5. | Unloading: Once finished, the robot picks the processed part and unloads it back onto the re-gripping jig. |
| STEP 6. | Stacking: After re-gripping, the robot places the finished part back into its original position on the pallet. |
Features
Maximizing Flexibility through Human-Robot Collaboration
Optimized Division of Labor: The robot continuously performs strenuous or repetitive loading tasks, while the human operator manages the overall workflow between pre- and post-processing stages, significantly increasing system efficiency.
Easy Work Teaching
Direct Teaching: Operators can teach new points simply by moving the robot arm by hand.
Compliance Control via Torque Sensors: Utilizing the high-sensitivity torque sensors, the robot can perform "soft" contact tasks, ensuring workpieces are perfectly seated flush against the chuck.
Rapid Changeovers: Even when part models change, additional teaching can be completed within 10 minutes, ensuring minimal production downtime.
Enhanced Operational Safety
Omnidirectional Sensitivity: High-resolution torque sensors (0.2Nm) are mounted on all 6 axes, allowing the robot to detect and stop immediately upon the slightest collision from any direction.
Shock-Minimizing Logic: Applies compliance control logic during picking and unloading to react softly to external forces, minimizing potential impact on both the robot and the workpiece.
Compact Installation
Space Efficiency: The compact design of the collaborative robot minimizes the physical footprint required for installation, allowing it to fit into existing factory layouts without major modifications.
Results
| Key Benefits | Improved operational efficiency by allowing existing workers to take on additional high-value tasks.
|
|---|---|
| Client Feedback | For products with long machining times, having a worker wait constantly was highly inefficient. Now, the robot handles the machining cycles, and the operator only needs to periodically exchange pallets. This has drastically boosted our overall labor productivity. |
Unauthorized copying or reproduction of any content on Marosol may violate the Unfair Competition Prevention Act and Copyright Act.
Recommended Solution
Inspection & Palletizing of Insert Molded Parts through YASKAWA GP8
This automation solution streamlines the post-molding process for insert molded parts through the YASKAWA Motoman-GP8. It automates the entire sequence—from appearance inspection to the selection and palletizing of products—leveraging a high-precision vision system. The system performs simultaneous inspection of two products, executing individual discharge or palletizing based on the specific results for each. By replacing manual visual checks with 100% automated vision inspection, the solution has significantly improved detection rates and overall product quality.
Steel Plate Bending through Hyundai Robotics HS220
This automation solution utilizes the Hyundai Robotics HS220 to automate the high-risk task of bending heavy steel plates into complex shapes. Due to the weight and large dimensions of these products, manual operation is physically demanding and significantly hinders production efficiency. This project was initiated to boost productivity through heavy-load automation and to ensure workplace safety by removing workers from hazardous zones. Because the robot maintains its grip on the steel plate during the entire bending process, cycle times are shortened, ensuring high output and consistent quality.
Implant 3D Inspection and Bin Picking using Denso COBOTTA
This quality inspection automation solution utilizes the Denso COBOTTA compact collaborative robot and QRS 3D vision to automate the bin picking of dental implants. This system is designed to handle the loading and inspection of implants during the machining process. Even for small and complex workpieces like implants, the QRS 3D vision system enables highly effective picking and sorting operations.