









Process layout
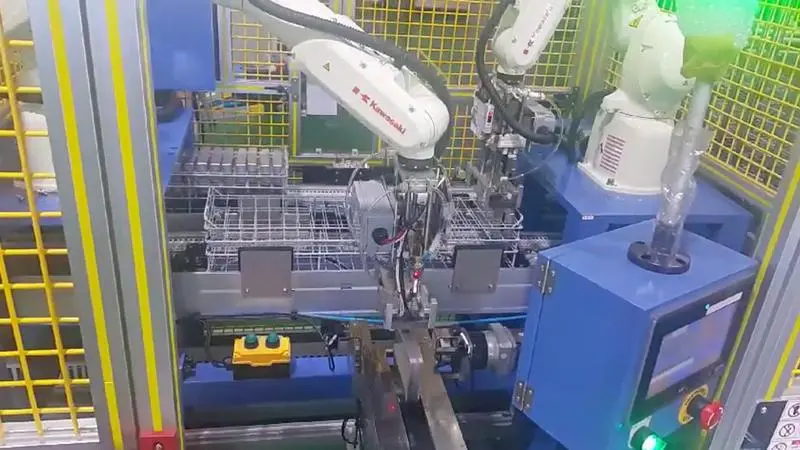
This solution utilizes two KAWASAKI RS007L robots to automate the process of loading and unloading secondary battery cases onto transfer jigs.
It ensures that finished secondary battery cells are automatically and precisely stacked onto the jigs for the next stage of production.
Components
| Robot |
|
|---|
Workflow
| STEP 1. | Feeding of secondary battery cases. |
|---|---|
| STEP 2. | High-precision product pickup by the robots. |
| STEP 3. | Loading and unloading the cases onto the transfer jigs. |
| STEP 4. | Discharge of the fully loaded jigs. |
Features
Compact Installation and High-Speed Performance
Space Efficiency: Utilizing two small-scale industrial robots allows for high-density installation in compact manufacturing footprints.
Minimized Wait Times: Applying two high-speed industrial robots minimizes idle time and ensures rapid stacking cycles.
Error Prevention: Proximity sensors mounted on the gripper fingertips verify the presence of the workpiece in real-time, ensuring reliable operations and minimizing pick-and-place errors.
Results
| Key Benefits | Significant reduction in cycle time and overall increase in production volume. |
|---|---|
| Client Feedback | The robots perform tasks rapidly in sync with our production speeds, which has directly led to a noticeable increase in overall productivity. |

Unauthorized copying or reproduction of any content on Marosol may violate the Unfair Competition Prevention Act and Copyright Act.
Recommended Solution

Shape Recognition and Sorting Automation using Neuromeka Indy7 and IndyEye
This process is a demo for shape recognition and product sorting automation utilizing 2D vision and a deep learning algorithm (Instance Segmentation). Because it performs tasks by recognizing product positions and types in real-time using 2D vision, it can automatically recognize and work even if product positions or types change.

Bolt Fastening Automation Using Hanwha Momentum HCR-12A
This application is a solution that automates bolt fastening using two Hanwha Momentum HCR-12A collaborative robots. Bolt fastening often leads to task failure even if the position is slightly off, and products can be damaged or misassembled if not assembled with appropriate force. The high positioning precision of the HCR-12A minimizes errors and allows for the task to be performed.

Power Cable Bin Picking using UR5e, Deep Learning, and Reinforcement Learning
This solution automates product sorting, assembly, and packing by utilizing 3D Vision, Deep Learning (Instance Segmentation), Reinforcement Learning (RL), and Motion Planning (OMPL) algorithms. By using 3D vision to recognize product types, product locations, and box positions in real-time, the system can automatically compensate for changes in positioning. The integration of deep learning and reinforcement learning for object identification allows the solution to be applied even to irregularly shaped objects. Because the system calibrates itself through continuous learning—even when conditions change, such as vision/robot misalignment or switching to different products—it ensures easy operation, simplified maintenance, and minimized downtime.
Process layout
This solution utilizes two KAWASAKI RS007L robots to automate the process of loading and unloading secondary battery cases onto transfer jigs.
It ensures that finished secondary battery cells are automatically and precisely stacked onto the jigs for the next stage of production.
Components
| Robot |
|
|---|
Workflow
| STEP 1. | Feeding of secondary battery cases. |
|---|---|
| STEP 2. | High-precision product pickup by the robots. |
| STEP 3. | Loading and unloading the cases onto the transfer jigs. |
| STEP 4. | Discharge of the fully loaded jigs. |
Features
Compact Installation and High-Speed Performance
Space Efficiency: Utilizing two small-scale industrial robots allows for high-density installation in compact manufacturing footprints.
Minimized Wait Times: Applying two high-speed industrial robots minimizes idle time and ensures rapid stacking cycles.
Error Prevention: Proximity sensors mounted on the gripper fingertips verify the presence of the workpiece in real-time, ensuring reliable operations and minimizing pick-and-place errors.
Results
| Key Benefits | Significant reduction in cycle time and overall increase in production volume. |
|---|---|
| Client Feedback | The robots perform tasks rapidly in sync with our production speeds, which has directly led to a noticeable increase in overall productivity. |
Unauthorized copying or reproduction of any content on Marosol may violate the Unfair Competition Prevention Act and Copyright Act.
Recommended Solution
Shape Recognition and Sorting Automation using Neuromeka Indy7 and IndyEye
This process is a demo for shape recognition and product sorting automation utilizing 2D vision and a deep learning algorithm (Instance Segmentation). Because it performs tasks by recognizing product positions and types in real-time using 2D vision, it can automatically recognize and work even if product positions or types change.
Bolt Fastening Automation Using Hanwha Momentum HCR-12A
This application is a solution that automates bolt fastening using two Hanwha Momentum HCR-12A collaborative robots. Bolt fastening often leads to task failure even if the position is slightly off, and products can be damaged or misassembled if not assembled with appropriate force. The high positioning precision of the HCR-12A minimizes errors and allows for the task to be performed.
Power Cable Bin Picking using UR5e, Deep Learning, and Reinforcement Learning
This solution automates product sorting, assembly, and packing by utilizing 3D Vision, Deep Learning (Instance Segmentation), Reinforcement Learning (RL), and Motion Planning (OMPL) algorithms. By using 3D vision to recognize product types, product locations, and box positions in real-time, the system can automatically compensate for changes in positioning. The integration of deep learning and reinforcement learning for object identification allows the solution to be applied even to irregularly shaped objects. Because the system calibrates itself through continuous learning—even when conditions change, such as vision/robot misalignment or switching to different products—it ensures easy operation, simplified maintenance, and minimized downtime.