









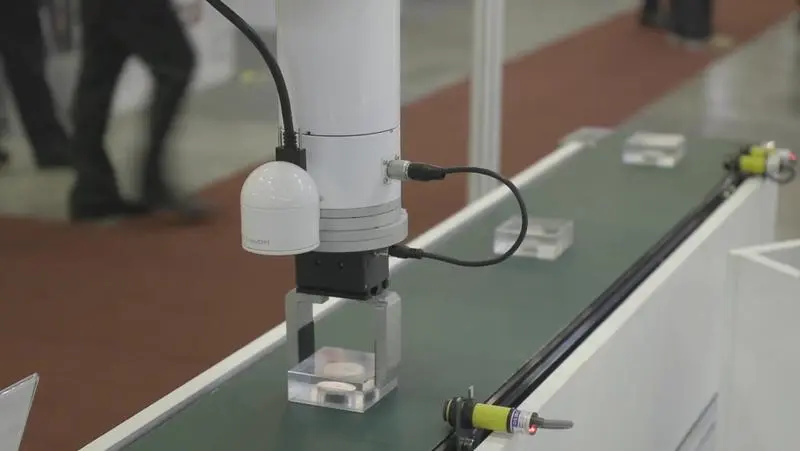
Process layout
This process is a demo for shape recognition and product sorting automation utilizing 2D vision and a deep learning algorithm (Instance Segmentation).
Because it performs tasks by recognizing product positions and types in real-time using 2D vision, it can automatically recognize and work even if product positions or types change.
Components
| Robot | Robot Indy7: 6-axis collaborative robot, payload 7kg, maximum reach 1.3m, weight 28kg, repeatability: ± 0.1 mm |
|---|
Workflow
| STEP 1. | Workpiece moves to a designated position on a conveyor belt. |
|---|---|
| STEP 2. | Shape recognition of the object through deep learning. |
| STEP 3. | Pick and place of the workpiece |
Features
Easy and simple robot teaching
: Reduced teaching time through vision calibration and teaching automation utilizing deep learning
Excellent recognition for various objects by recognizing objects based on deep learning
Automatic learning of optimal pick positions according to product shapes
Compact and simple installation
: No need for separate feeder production as there is no need to fix inputs in a precise position
Possible to work by simply installing the robot in the space where the worker used to work
Results
| Key Benefits | |
|---|---|
| Client Feedback | Thanks to IndyEye, which uses deep learning and vision sensors, fast and simple teaching is possible, and picking and placing can be performed by recognizing the shape of products in real-time.
|

Unauthorized copying or reproduction of any content on Marosol may violate the Unfair Competition Prevention Act and Copyright Act.
Recommended Solution

Machine Tending Automation using Neuromeka Indy7
Machine Tending Automation using Neuromeka Indy7 This application case features an automated Machine Tending and Palletizing solution using the Indy7 to transfer objects from a conveyor into a press machine for processing, followed by organized stacking. To handle both pallets and flanges efficiently, a specialized hybrid gripper—combining a vacuum gripper and an electric gripper—is utilized. This allows the robot to manage diverse workpieces within a single unified process.

HRT System Pickit 3D Vision
Project Overview This solution utilizes the Pickit 3D Vision for bin picking and robot guidance. Without 3D vision, approximately 10% of parts fall over or shift during internal transport, making it impossible for the robot to pick them from their original positions. The Pickit 3D vision system enables the robot to detect, extract, and place parts even when they are oriented in specific directions. Project Background & Objectives Automated Picking: Enabling the robot to pick items without manual re-alignment by humans. Consistent Dispensing: Maintaining uniform application tasks even if the position of heavy workpieces shifts. Defect Minimization: Minimizing the defect rate through precise positioning.

AI Inspection Solution: Yaskawa Robots Integrated with DAVA for Precision Defect Detection
Project Overview DAVA (Detecting Application by Vision A.I), an AI-powered pass/fail inspection software developed by TNSAI, is a program that can be integrated into the Easy Checker series. It surpasses the limitations of traditional rule-based machine vision, allowing for flexible and easy changes to inspection targets. By utilizing image detection technology that leverages diffused reflection, it provides a solution for fast and accurate detection of even microscopic defect types. Project Background & Objectives Defect Classification: Utilizing AI to classify defect types and detect defective products.
Process layout
This process is a demo for shape recognition and product sorting automation utilizing 2D vision and a deep learning algorithm (Instance Segmentation).
Because it performs tasks by recognizing product positions and types in real-time using 2D vision, it can automatically recognize and work even if product positions or types change.
Components
| Robot | Robot Indy7: 6-axis collaborative robot, payload 7kg, maximum reach 1.3m, weight 28kg, repeatability: ± 0.1 mm |
|---|
Workflow
| STEP 1. | Workpiece moves to a designated position on a conveyor belt. |
|---|---|
| STEP 2. | Shape recognition of the object through deep learning. |
| STEP 3. | Pick and place of the workpiece |
Features
Easy and simple robot teaching
: Reduced teaching time through vision calibration and teaching automation utilizing deep learning
Excellent recognition for various objects by recognizing objects based on deep learning
Automatic learning of optimal pick positions according to product shapes
Compact and simple installation
: No need for separate feeder production as there is no need to fix inputs in a precise position
Possible to work by simply installing the robot in the space where the worker used to work
Results
| Key Benefits | |
|---|---|
| Client Feedback | Thanks to IndyEye, which uses deep learning and vision sensors, fast and simple teaching is possible, and picking and placing can be performed by recognizing the shape of products in real-time.
|
Unauthorized copying or reproduction of any content on Marosol may violate the Unfair Competition Prevention Act and Copyright Act.
Recommended Solution
Machine Tending Automation using Neuromeka Indy7
Machine Tending Automation using Neuromeka Indy7 This application case features an automated Machine Tending and Palletizing solution using the Indy7 to transfer objects from a conveyor into a press machine for processing, followed by organized stacking. To handle both pallets and flanges efficiently, a specialized hybrid gripper—combining a vacuum gripper and an electric gripper—is utilized. This allows the robot to manage diverse workpieces within a single unified process.
HRT System Pickit 3D Vision
Project Overview This solution utilizes the Pickit 3D Vision for bin picking and robot guidance. Without 3D vision, approximately 10% of parts fall over or shift during internal transport, making it impossible for the robot to pick them from their original positions. The Pickit 3D vision system enables the robot to detect, extract, and place parts even when they are oriented in specific directions. Project Background & Objectives Automated Picking: Enabling the robot to pick items without manual re-alignment by humans. Consistent Dispensing: Maintaining uniform application tasks even if the position of heavy workpieces shifts. Defect Minimization: Minimizing the defect rate through precise positioning.
AI Inspection Solution: Yaskawa Robots Integrated with DAVA for Precision Defect Detection
Project Overview DAVA (Detecting Application by Vision A.I), an AI-powered pass/fail inspection software developed by TNSAI, is a program that can be integrated into the Easy Checker series. It surpasses the limitations of traditional rule-based machine vision, allowing for flexible and easy changes to inspection targets. By utilizing image detection technology that leverages diffused reflection, it provides a solution for fast and accurate detection of even microscopic defect types. Project Background & Objectives Defect Classification: Utilizing AI to classify defect types and detect defective products.