









Process layout
Process Overview
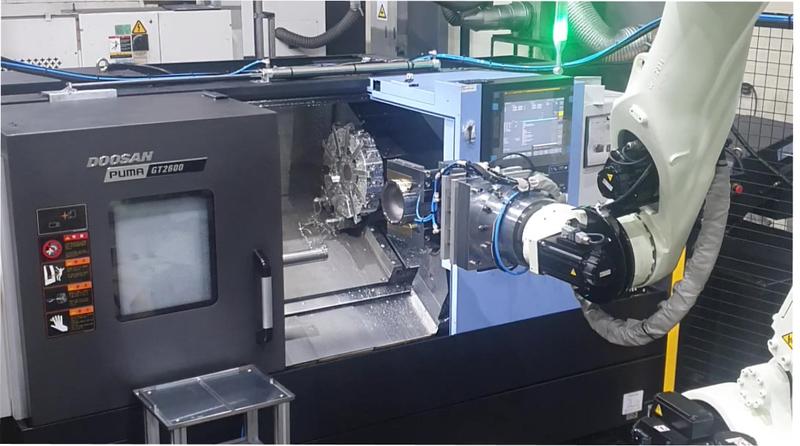
This solution enables automatic loading of workpieces into machining equipment, including irregular, non-standard workpieces generated from hot forging, by using a specially designed gripping tool in the automotive parts machining load/unload process.
Developed through the company’s in-house R&D, this automation system uses a custom-made gripper to automatically load hot-forged workpieces, even those with inconsistent shapes, into the machining area.
Components
| Robot | KAWASAKI CX210L: 6-axis industrial robot, payload 210 kg, max reach 2,699 mm, weight 870 kg, repeatability ±0.06 mm |
|---|---|
| Peripherals |
|
Workflow
| STEP 1. | Operator loads workpieces onto the infeed conveyor |
|---|---|
| STEP 2. | Robot loads workpieces into the machining center |
| STEP 3. | Machining completed |
| STEP 4. | Robot unloads finished parts from the machine |
| STEP 5. | Automated inspection |
| STEP 6. | Robot loads finished parts into the rust prevention unit |
| STEP 7. | Robot transfers finished parts from the rust prevention unit to the conveyor |
Features
Increase productivity and resolve issues in existing automation
Enables automatic loading of large hot-forged workpieces into the machining center without defect sorting
Secures high productivity through continuous operation with minimal downtime
Addresses labor shortage issues by mechanizing physically demanding tasks (loading heavy workpieces over 12 kg into machining equipment)
Results
| Key Benefits | Improved working environment and labor conditions
No need to sort good vs. defective parts before loading into the machining center |
|---|---|
| Client Feedback | By enabling automatic loading into the machining center without defect sorting for large hot-forged workpieces, the system reduced unit costs and increased production output. |

Unauthorized copying or reproduction of any content on Marosol may violate the Unfair Competition Prevention Act and Copyright Act.
Recommended Solution

Automated Two-Part Gasket Sealing Solution
Process Overview This application is a solution that provides immediate foam forming using a Loobee sealing automation system, along with gasket product sealing equipment and raw material supply. It enables stable fixture mounting using gaskets without the need to finish the joint area with adhesive. Reliable adhesion is also possible even on curved surfaces, making it applicable to parts of any shape.

A House Built by Robots?! Space Factory Automates Modular Housing Window Assembly! 🛠️🏠
Enabled mass production by modularizing 42 assembly patterns

Deburring Robot Automation: Burr Removal on Ibarri Parts — Seriously This Easy?! 😮
A robotic deburring system that automatically removes burrs (BURR) generated on the machined surfaces of nickel parts applied to Honda Accord vehicles using two robots. Collaboration between a positioning robot and a deburring robot. For areas where the deburring tool cannot access, a dedicated deburring device is configured to fully perform deburring on complex-shaped machined surfaces. Integrated with the machining line to implement full-process automation, including deburring, washing, inspection, rust prevention, and packaging.
Process layout
Process Overview
This solution enables automatic loading of workpieces into machining equipment, including irregular, non-standard workpieces generated from hot forging, by using a specially designed gripping tool in the automotive parts machining load/unload process.
Developed through the company’s in-house R&D, this automation system uses a custom-made gripper to automatically load hot-forged workpieces, even those with inconsistent shapes, into the machining area.
Components
| Robot | KAWASAKI CX210L: 6-axis industrial robot, payload 210 kg, max reach 2,699 mm, weight 870 kg, repeatability ±0.06 mm |
|---|---|
| Peripherals |
|
Workflow
| STEP 1. | Operator loads workpieces onto the infeed conveyor |
|---|---|
| STEP 2. | Robot loads workpieces into the machining center |
| STEP 3. | Machining completed |
| STEP 4. | Robot unloads finished parts from the machine |
| STEP 5. | Automated inspection |
| STEP 6. | Robot loads finished parts into the rust prevention unit |
| STEP 7. | Robot transfers finished parts from the rust prevention unit to the conveyor |
Features
Increase productivity and resolve issues in existing automation
Enables automatic loading of large hot-forged workpieces into the machining center without defect sorting
Secures high productivity through continuous operation with minimal downtime
Addresses labor shortage issues by mechanizing physically demanding tasks (loading heavy workpieces over 12 kg into machining equipment)
Results
| Key Benefits | Improved working environment and labor conditions
No need to sort good vs. defective parts before loading into the machining center |
|---|---|
| Client Feedback | By enabling automatic loading into the machining center without defect sorting for large hot-forged workpieces, the system reduced unit costs and increased production output. |
Unauthorized copying or reproduction of any content on Marosol may violate the Unfair Competition Prevention Act and Copyright Act.
Recommended Solution
Automated Two-Part Gasket Sealing Solution
Process Overview This application is a solution that provides immediate foam forming using a Loobee sealing automation system, along with gasket product sealing equipment and raw material supply. It enables stable fixture mounting using gaskets without the need to finish the joint area with adhesive. Reliable adhesion is also possible even on curved surfaces, making it applicable to parts of any shape.
A House Built by Robots?! Space Factory Automates Modular Housing Window Assembly! 🛠️🏠
Enabled mass production by modularizing 42 assembly patterns
Deburring Robot Automation: Burr Removal on Ibarri Parts — Seriously This Easy?! 😮
A robotic deburring system that automatically removes burrs (BURR) generated on the machined surfaces of nickel parts applied to Honda Accord vehicles using two robots. Collaboration between a positioning robot and a deburring robot. For areas where the deburring tool cannot access, a dedicated deburring device is configured to fully perform deburring on complex-shaped machined surfaces. Integrated with the machining line to implement full-process automation, including deburring, washing, inspection, rust prevention, and packaging.