









Process layout
Process Overview
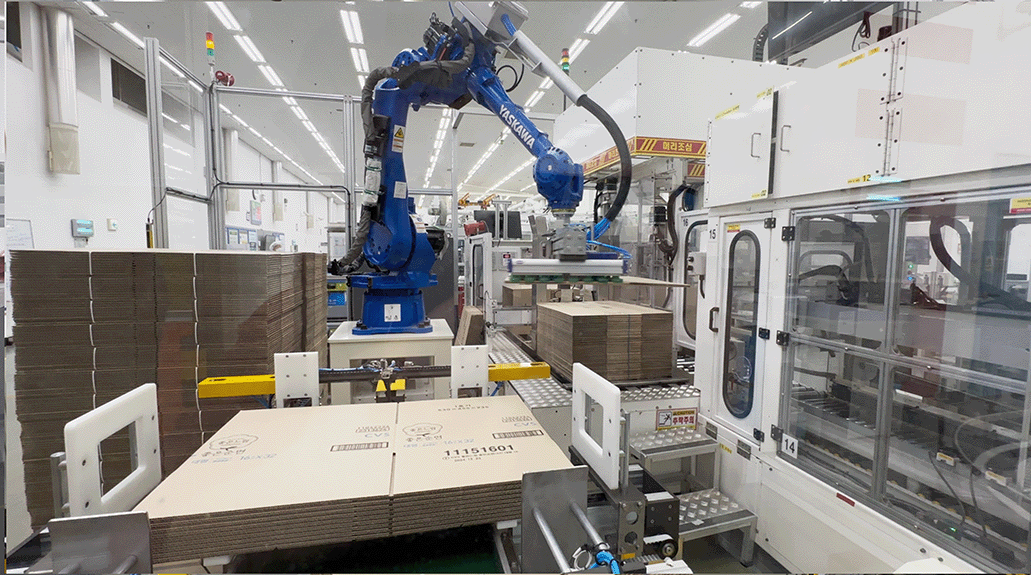
This implementation case, implemented at Yuhan-Kimberly's Chungju factory, combines a Yaskawa industrial robot with a string cutting workstation to achieve automated depalletizing and string cutting. The client introduced the depalletizing system to reduce labor costs and work fatigue, and expressed strong interest in automating rope cutting and discharge to maximize cost savings and efficiency.
This solution sorts and cuts boxes of various sizes before feeding them to the case packer, improving the efficiency of the box feeding and rope cutting processes, while also reducing the physical burden on workers and ensuring safety.
Project Background and Objectives
At Yuhan-Kimberly's Chungju factory, the process of dismantling palletized boxes and loading them into case packers individually was entirely manual. This process was highly repetitive and presented a constant risk of safety accidents due to the use of knives during the removal of the twine.
The goal of this project was to automate the entire process, from depalletizing to loading into the case packer, minimizing human dependence. Furthermore, by unmanning the twine cutting process, we aimed to ensure worker safety, reduce fatigue and on-site personnel burden, and ensure stable plant operations.
Components
| Robot | Yaskawa Industrial Robot GP50: This multi-joint robot, capable of high-speed, high-precision movements, is optimized for palletizing tasks. It can automatically load and return a variety of products, making it effective for industrial automation. |
|---|---|
| Peripherals | Box Sorter and Rope Cutter: This workstation sorts boxes of various sizes, cuts the rope, and then discharges them. Safety Light Curtain and Fence: A visual barrier separates the operator and robot areas. If a worker approaches the depalletizing area, the robot immediately stops operating, ensuring safety. |
Workflow
| STEP 1. | Material Input: The worker supplies pallets with boxes stacked in them to the designated locations. |
|---|---|
| STEP 2. | Recipe input: After loading the specification information of the supplied box from the OP panel, operate the start operation button. |
| STEP 3. | Depalletizing: Based on the loaded recipe, the robot picks up the bundled boxes on the pallet and moves them to the sorting/cutting workstation. |
| STEP 4. | Box Sorting: The robot sorts the bundled boxes it has placed down using servo motors and air cylinders. |
| STEP 5. | Rope Cutting: Perform the rope cutting in an aligned state. |
| STEP 6. | Rope discharge: The cut rope is caught with a hook and discharged. |
| STEP 7. | Box Realignment: Realignment is performed to prevent the box from being misaligned during the rope cutting process. |
| STEP 8. | Box discharge: The robot feeds the cut boxes one by one to the case packer. |
Features
Special Features
- Flexible handling for various box sizes: 27 different box sizes can be sorted and cut, regardless of size.
- Free product loading conditions: Even if the number of bundled boxes on a pallet varies, the robot can perform depalletizing simply by entering the conditions on the OP panel.
Introduction Effects
- Increased Efficiency: Automated depalletizing and cutting operations increase work speed and reduce operator fatigue.
- Cost Savings: Process automation reduces labor costs and enables more efficient operations.
- Improved Safety: Safety light curtains, safety mats, and laser scanners minimize the risk of accidents during operations.
Results
| Key Benefits | The automated depalletizing and rope cutting solution introduced at Yuhan-Kimberly's Chungju factory has significantly improved work efficiency, safety, and workforce management. Previously, each process required two to three workers to manually disassemble boxes and remove rope. With the automated solution, only one worker is required to intermittently monitor the system, resulting in a workforce reduction of over 50%. |
|---|---|
| Client Feedback | The client commented, "The introduction of depalletizing robots not only reduced the physical burden on workers, but also significantly improved logistics efficiency. In particular, the well-equipped safety system created an environment where workers could focus on their work with greater peace of mind." |

Unauthorized copying or reproduction of any content on Marosol may violate the Unfair Competition Prevention Act and Copyright Act.
Recommended Solution

Automation of the Assembly for ship carrier modules
By applying a robot-based automatic handling system from raw material input to finished product loading, we have achieved an approximately 60% improvement in UPH and secured a stable production flow.

Automated automotive battery palletizing: Safely stack batteries weighing over 60kg with the YASKAWA GP225 💪
This solution automates the repalletizing process for Atlas batteries produced by Hankook & Company for export.

Successfully automated the Samlak heat treatment loading process!🙌 We even built a perfect jig design. (ft. Hyundai Robotics Industrial Robot)
This project involved the introduction of automated loading/unloading to ensure uniform heat treatment of the carrier mid-planet, a key component of automotive transmissions