









Process layout
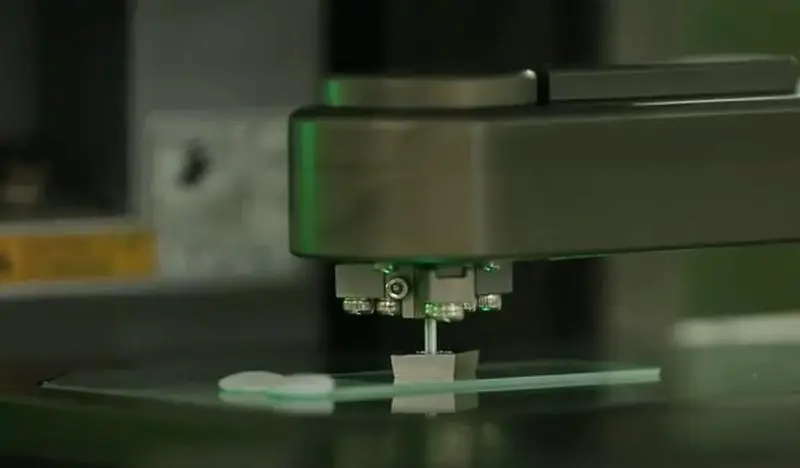
This vision inspection solution utilizes the Doosan M0609 collaborative robot and the Keyence Image Dimension Measurement System (IM Series) to automate the dimensional inspection and defect sorting of cutting tools.
Previously, operators had to manually measure each part and perform visual inspections, which often led to human error in sorting and required a high amount of labor for simple, repetitive tasks.
By implementing robot automation, inspections are now performed continuously without idle time. This has increased the precision of defect detection, simultaneously improving both productivity and product quality.
Components
| Robot |
|
|---|
Workflow
| STEP 1. | Picking: The robot picks a cutting tool from the supply tray. |
|---|---|
| STEP 2. | Cleaning: The tool is placed into an air-blowing device for cleaning to ensure accurate measurement. |
| STEP 3. | Inspection: The robot loads the tool into the Keyence vision inspection system. |
| STEP 4. | Sorting: Based on the measurement results, the robot classifies and sorts the tool as either Pass (Good) or Fail (Defect). |
Features
Improved Production Efficiency and Quality
Continuous Operation: Maximizes production efficiency by performing seamless, non-stop tasks with minimal idle time.
High-Precision Inspection: Increases defect detection rates through the integration of professional-grade automated measurement equipment.
Accurate and Fast Vision Inspection System
High-Speed Measurement: Capable of inspecting up to 99 points in just a few seconds.
Simplified Reporting: Easy-to-use interface with automated reporting of inspection results.
Integrated Data Management: Measurement data is automatically saved and managed as soon as the inspection is completed.
Auto-Origin Detection: Eliminates the need for specialized fixtures by automatically detecting the origin of the target position.
Auto-Focus: Effortlessly measures various product shapes using the automated focus adjustment feature.
Compact Installation
Space Optimization: Maximizes floor space by integrating the robot base, inspection equipment, and pallets into a single, cohesive unit.
Minimal Footprint: Utilizes a compact collaborative robot to minimize the physical area required for installation.
Results
| Key Benefits | Significant reduction in labor costs for manual inspection tasks.
Improved product quality through enhanced defect detection capabilities.
|
|---|---|
| Client Feedback | As production volume increased, the inspection process became a major bottleneck. By automating this stage, we’ve improved overall throughput and successfully elevated our quality standards. |

Unauthorized copying or reproduction of any content on Marosol may violate the Unfair Competition Prevention Act and Copyright Act.
Recommended Solution

Machining Center End Mill Assistance using Doosan M1013
This machine tending automation solution utilizes the Doosan M1013 collaborative robot to automate the loading and unloading of workpieces for end mill machining in a machining center. Previously, operators had to remain stationed at the machine to manually feed and remove workpieces for every cycle. With this solution, the robot takes over the loading and unloading tasks, allowing the human operator to manage multiple machines simultaneously, significantly boosting overall labor efficiency and productivity.

Implant 3D Inspection and Bin Picking using Denso COBOTTA
This quality inspection automation solution utilizes the Denso COBOTTA compact collaborative robot and QRS 3D vision to automate the bin picking of dental implants. This system is designed to handle the loading and inspection of implants during the machining process. Even for small and complex workpieces like implants, the QRS 3D vision system enables highly effective picking and sorting operations.

QR Code Labeling & Inspection for Plastic Products through Cartesian Robots
This automation solution replaces manual plastic product inspection and QR code labeling with a system integrated with vision inspection and four Cartesian (Gantry) robots. By utilizing four Cartesian robots, the workload is strategically distributed based on the required takt time, enabling rapid and continuous operations. The system performs comprehensive exterior inspections both before and after the QR code is applied, as well as a final attachment verification to minimize defect rates. The project was initiated to achieve 100% inspection of all products to prevent defects or mixed-part issues, ultimately driving significant quality improvements and productivity gains.
Process layout
This vision inspection solution utilizes the Doosan M0609 collaborative robot and the Keyence Image Dimension Measurement System (IM Series) to automate the dimensional inspection and defect sorting of cutting tools.
Previously, operators had to manually measure each part and perform visual inspections, which often led to human error in sorting and required a high amount of labor for simple, repetitive tasks.
By implementing robot automation, inspections are now performed continuously without idle time. This has increased the precision of defect detection, simultaneously improving both productivity and product quality.
Components
| Robot |
|
|---|
Workflow
| STEP 1. | Picking: The robot picks a cutting tool from the supply tray. |
|---|---|
| STEP 2. | Cleaning: The tool is placed into an air-blowing device for cleaning to ensure accurate measurement. |
| STEP 3. | Inspection: The robot loads the tool into the Keyence vision inspection system. |
| STEP 4. | Sorting: Based on the measurement results, the robot classifies and sorts the tool as either Pass (Good) or Fail (Defect). |
Features
Improved Production Efficiency and Quality
Continuous Operation: Maximizes production efficiency by performing seamless, non-stop tasks with minimal idle time.
High-Precision Inspection: Increases defect detection rates through the integration of professional-grade automated measurement equipment.
Accurate and Fast Vision Inspection System
High-Speed Measurement: Capable of inspecting up to 99 points in just a few seconds.
Simplified Reporting: Easy-to-use interface with automated reporting of inspection results.
Integrated Data Management: Measurement data is automatically saved and managed as soon as the inspection is completed.
Auto-Origin Detection: Eliminates the need for specialized fixtures by automatically detecting the origin of the target position.
Auto-Focus: Effortlessly measures various product shapes using the automated focus adjustment feature.
Compact Installation
Space Optimization: Maximizes floor space by integrating the robot base, inspection equipment, and pallets into a single, cohesive unit.
Minimal Footprint: Utilizes a compact collaborative robot to minimize the physical area required for installation.
Results
| Key Benefits | Significant reduction in labor costs for manual inspection tasks.
Improved product quality through enhanced defect detection capabilities.
|
|---|---|
| Client Feedback | As production volume increased, the inspection process became a major bottleneck. By automating this stage, we’ve improved overall throughput and successfully elevated our quality standards. |
Unauthorized copying or reproduction of any content on Marosol may violate the Unfair Competition Prevention Act and Copyright Act.
Recommended Solution
Machining Center End Mill Assistance using Doosan M1013
This machine tending automation solution utilizes the Doosan M1013 collaborative robot to automate the loading and unloading of workpieces for end mill machining in a machining center. Previously, operators had to remain stationed at the machine to manually feed and remove workpieces for every cycle. With this solution, the robot takes over the loading and unloading tasks, allowing the human operator to manage multiple machines simultaneously, significantly boosting overall labor efficiency and productivity.
Implant 3D Inspection and Bin Picking using Denso COBOTTA
This quality inspection automation solution utilizes the Denso COBOTTA compact collaborative robot and QRS 3D vision to automate the bin picking of dental implants. This system is designed to handle the loading and inspection of implants during the machining process. Even for small and complex workpieces like implants, the QRS 3D vision system enables highly effective picking and sorting operations.
QR Code Labeling & Inspection for Plastic Products through Cartesian Robots
This automation solution replaces manual plastic product inspection and QR code labeling with a system integrated with vision inspection and four Cartesian (Gantry) robots. By utilizing four Cartesian robots, the workload is strategically distributed based on the required takt time, enabling rapid and continuous operations. The system performs comprehensive exterior inspections both before and after the QR code is applied, as well as a final attachment verification to minimize defect rates. The project was initiated to achieve 100% inspection of all products to prevent defects or mixed-part issues, ultimately driving significant quality improvements and productivity gains.