









Process layout
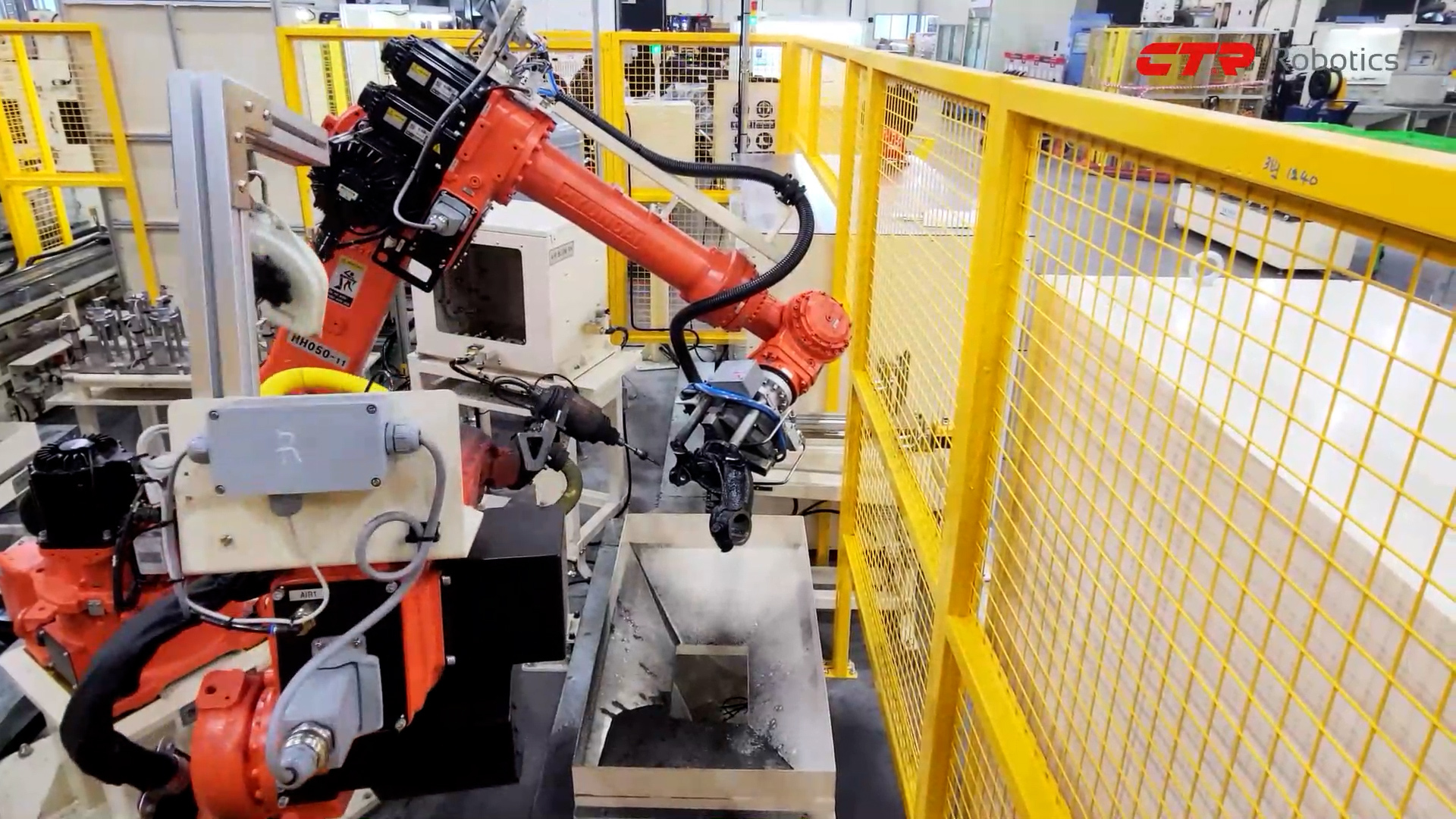
A robotic deburring system that automatically removes burrs (BURR) generated on the machined surfaces of nickel parts applied to Honda Accord vehicles using two robots.
Collaboration between a positioning robot and a deburring robot. For areas where the deburring tool cannot access, a dedicated deburring device is configured to fully perform deburring on complex-shaped machined surfaces.
Integrated with the machining line to implement full-process automation, including deburring, washing, inspection, rust prevention, and packaging.
Components
| Robot | Consists of a product positioning robot and a deburring robot, compatible with various robot models. |
|---|---|
| Peripherals | Deburring tool: Able to absorb irregular-shaped parts in the X, Y, and Z-axis directions. Air floating function (X/Y direction 5°, Z direction 8 mm). Protects the product and tool from impact. Equipped with a deburring tool breakage detection function. For areas where the deburring tool cannot access, a dedicated deburring device is applied. |
Workflow
| STEP 1. | Machined parts are fed into the dedicated deburring system |
|---|---|
| STEP 2. | Special deburring and deburring on the robot gripping area |
| STEP 3. | Positioning robot changes the part position and works in sync with the deburring robot |
| STEP 4. | Air blowing after deburring |
| STEP 5. | Inspection, rust prevention, discharge, packaging. |
Features
Deburring of complex-shaped parts using two robots
In-line automation for existing machining lines / Stand-alone line configuration available
Air-floating deburring tool applied to protect the part and tool
Full-process unmanned automation configuration: machining, deburring, air blow, inspection, rust prevention, washing, packaging
Customized solutions tailored to customer needs based on extensive mass-production experience
Results
| Client Feedback | By implementing robotic automation for the deburring process, which previously required many operators and involved high labor intensity, we eliminated the risk of safety accidents caused by inserting hands into the work area (through three shifts of operators: day/night). Process automation improved productivity and reduced quality variation in deburring. |
|---|

Unauthorized copying or reproduction of any content on Marosol may violate the Unfair Competition Prevention Act and Copyright Act.
Recommended Solution

Battery Palletizing Automation: Safely Stack Batteries Weighing Over 60kg With the YASKAWA GP225 💪
Standardized over 200 palletizing variables to achieve a consistent cycle time

Yuhan-Kimberly's Choice! Fully Automated Depalletizing and String Cutting 📦
Process Overview This implementation case, implemented at Yuhan-Kimberly's Chungju factory , combines a Yaskawa industrial robot with a string cutting workstation to achieve automated depalletizing and string cutting. The client introduced the depalletizing system to reduce labor costs and work fatigue, and expressed strong interest in automating rope cutting and discharge to maximize cost savings and efficiency. This solution sorts and cuts boxes of various sizes before feeding them to the case packer, improving the efficiency of the box feeding and rope cutting processes, while also reducing the physical burden on workers and ensuring safety. Project Background and Objectives At Yuhan-Kimberly's Chungju factory , the process of dismantling palletized boxes and loading them into case packers individually was entirely manual. This process was highly repetitive and presented a constant risk of safety accidents due to the use of knives during the removal of the twine. The goal of this project was to automate the entire process, from depalletizing to loading into the case packer, minimizing human dependence. Furthermore, by unmanning the twine cutting process, we aimed to ensure worker safety, reduce fatigue and on-site personnel burden, and ensure stable plant operations.

Automated Electric Vehicle Console Assembly with EPSON SCARA Robots! 🦾
Process Overview Bigwave Robotics (Marosol) established an automated assembly line for console parts for Kia Motors' newly launched SUV-type electric vehicle. The existing console assembly line is a large-scale assembly line, requiring an average of 40-60 workers to assemble manually. The lack of automation experience presented challenges in securing space and recruiting assembly workers. Frequent staff turnover and resulting skill level issues hindered productivity. To address this, the company replaced some workers with robots, addressing the labor shortage and consistently ensuring productivity by adapting to the changing workforce. Warranty Period 1 Year Performance Year 2024 Project Duration 4 Months Project Background and Objectives Building a multi-product automated production line and reducing labor costs through robotic automation Preventing mis-assembly and mis-assembly using a lot-of-lot system and ensuring traceability Remote control and integrated management using SOLlink
Process layout
A robotic deburring system that automatically removes burrs (BURR) generated on the machined surfaces of nickel parts applied to Honda Accord vehicles using two robots.
Collaboration between a positioning robot and a deburring robot. For areas where the deburring tool cannot access, a dedicated deburring device is configured to fully perform deburring on complex-shaped machined surfaces.
Integrated with the machining line to implement full-process automation, including deburring, washing, inspection, rust prevention, and packaging.
Components
| Robot | Consists of a product positioning robot and a deburring robot, compatible with various robot models. |
|---|---|
| Peripherals | Deburring tool: Able to absorb irregular-shaped parts in the X, Y, and Z-axis directions. Air floating function (X/Y direction 5°, Z direction 8 mm). Protects the product and tool from impact. Equipped with a deburring tool breakage detection function. For areas where the deburring tool cannot access, a dedicated deburring device is applied. |
Workflow
| STEP 1. | Machined parts are fed into the dedicated deburring system |
|---|---|
| STEP 2. | Special deburring and deburring on the robot gripping area |
| STEP 3. | Positioning robot changes the part position and works in sync with the deburring robot |
| STEP 4. | Air blowing after deburring |
| STEP 5. | Inspection, rust prevention, discharge, packaging. |
Features
Deburring of complex-shaped parts using two robots
In-line automation for existing machining lines / Stand-alone line configuration available
Air-floating deburring tool applied to protect the part and tool
Full-process unmanned automation configuration: machining, deburring, air blow, inspection, rust prevention, washing, packaging
Customized solutions tailored to customer needs based on extensive mass-production experience
Results
| Client Feedback | By implementing robotic automation for the deburring process, which previously required many operators and involved high labor intensity, we eliminated the risk of safety accidents caused by inserting hands into the work area (through three shifts of operators: day/night). Process automation improved productivity and reduced quality variation in deburring. |
|---|
Unauthorized copying or reproduction of any content on Marosol may violate the Unfair Competition Prevention Act and Copyright Act.
Recommended Solution
Battery Palletizing Automation: Safely Stack Batteries Weighing Over 60kg With the YASKAWA GP225 💪
Standardized over 200 palletizing variables to achieve a consistent cycle time
Yuhan-Kimberly's Choice! Fully Automated Depalletizing and String Cutting 📦
Process Overview This implementation case, implemented at Yuhan-Kimberly's Chungju factory , combines a Yaskawa industrial robot with a string cutting workstation to achieve automated depalletizing and string cutting. The client introduced the depalletizing system to reduce labor costs and work fatigue, and expressed strong interest in automating rope cutting and discharge to maximize cost savings and efficiency. This solution sorts and cuts boxes of various sizes before feeding them to the case packer, improving the efficiency of the box feeding and rope cutting processes, while also reducing the physical burden on workers and ensuring safety. Project Background and Objectives At Yuhan-Kimberly's Chungju factory , the process of dismantling palletized boxes and loading them into case packers individually was entirely manual. This process was highly repetitive and presented a constant risk of safety accidents due to the use of knives during the removal of the twine. The goal of this project was to automate the entire process, from depalletizing to loading into the case packer, minimizing human dependence. Furthermore, by unmanning the twine cutting process, we aimed to ensure worker safety, reduce fatigue and on-site personnel burden, and ensure stable plant operations.
Automated Electric Vehicle Console Assembly with EPSON SCARA Robots! 🦾
Process Overview Bigwave Robotics (Marosol) established an automated assembly line for console parts for Kia Motors' newly launched SUV-type electric vehicle. The existing console assembly line is a large-scale assembly line, requiring an average of 40-60 workers to assemble manually. The lack of automation experience presented challenges in securing space and recruiting assembly workers. Frequent staff turnover and resulting skill level issues hindered productivity. To address this, the company replaced some workers with robots, addressing the labor shortage and consistently ensuring productivity by adapting to the changing workforce. Warranty Period 1 Year Performance Year 2024 Project Duration 4 Months Project Background and Objectives Building a multi-product automated production line and reducing labor costs through robotic automation Preventing mis-assembly and mis-assembly using a lot-of-lot system and ensuring traceability Remote control and integrated management using SOLlink